Developing a Digital Twin
Oden Institute director leads effort to create virtual UAVs that can predict vehicle health, enable autonomous decision-making
Oden Institute director leads effort to create virtual UAVs that can predict vehicle health, enable autonomous decision-making
In the not too distant future, we can expect to see our skies filled with unmanned aerial vehicles (UAVs) delivering packages, maybe even people, from location to location.
In such a world, there will also be a digital twin for each UAV in the fleet: a virtual model that will follow the UAV through its existence, evolving with time.
“It’s essential that UAVs monitor their structural health,” said Karen Willcox, director of the Oden Institute for Computational Engineering and Sciences at The University of Texas at Austin (UT Austin) and an expert in computational aerospace engineering. “And it’s essential that they make good decisions that result in good behavior.”
An invited speaker at the 2019 International Conference for High Performance Computing, Networking, Storage and Analysis (SC19), Willcox shared the details of a project — supported primarily by the U.S. Air Force program in Dynamic Data-Driven Application Systems (DDDAS) — to develop a predictive digital twin for a custom-built UAV. The project is a collaboration between UT Austin, MIT, Akselos, and Aurora Flight Sciences.
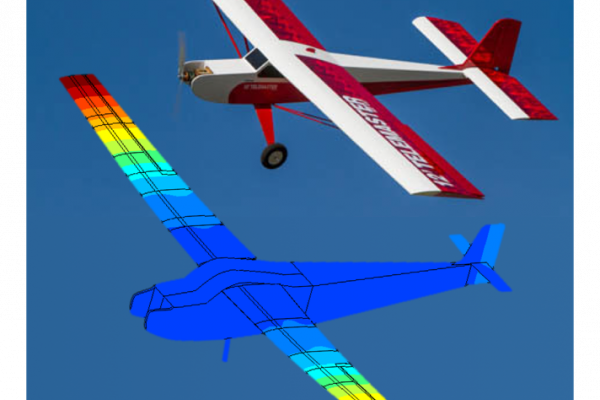
The twin represents each component of the UAV, as well as its integrated whole, using physics-based models that capture the details of its behavior from the fine-scale to the macro level. The twin also ingests on-board sensor data from the vehicle and integrates that information with the model to create real-time predictions of the health of the vehicle.
Is the UAV in danger of crashing? Should it change its planned route to minimize risks? With a predictive digital twin, these kinds of decisions can be made on the fly, to keep UAVs flying.